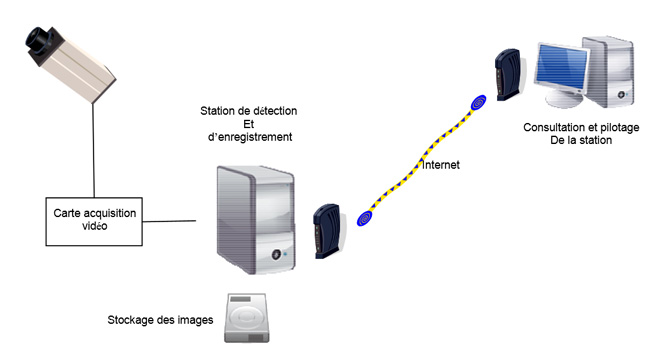
Suite à l’article du 17 juillet 2011, nous avions prévu de tester nos stations de détection de type “Lyre”, UFOCATCH® et UFOCATCH® V2, sur le terrain, afin de valider certains concepts. C’est avec un peu de retard sur le planning que ce test grandeur nature a pu être effectué, faisant écho au précédent essai réalisé en mars 2009. Pour l’occasion, le propriétaire d’un aéroclub privé nous a généreusement autorisé à utiliser son terrain pour nos différentes expérimentations.
Pour rappel, UFOCATCH® V2 est une station de détection autonome de nouvelle génération, qui pourra, à terme, être utilisée sur le terrain et fonctionner 24 heures sur 24.

Les méthodes d’étalonnage, de prise de clichés de spectres et d’analyse sont des étapes cruciales à prendre en compte au cours de leur conception. Celles-ci ayant déjà été validées lors des premiers essais en conditions réelles, tout notre intérêt s’est porté cette fois-ci sur le test des équipements périphériques assurant le bon fonctionnement des stations de détection (alimentation électrique, câblages, softwares, transmission/réception des signaux…).
Dans l’optique de pouvoir déployer ce type de station dans des lieux isolés loin de tout réseau électrique, une régie mobile a été conçue. Celle-ci peut être installée discrètement dans le coffre d’un véhicule, et permet de piloter simultanément, en automatique ou en manuel, deux stations de détection positionnées sur le toit.
-

Systèmes embarqués en veille dans le véhicule -

Déploiement des systèmes embarqués
-

Le coffre de la régie sert de support aux stations de détection… -

…ainsi qu’au fisheye.
Cette régie est équipée de deux sources d’alimentation autonomes, indépendantes du véhicule, qui permettent de fournir de l’énergie à des équipements prévus pour fonctionner à l’origine sur secteur (230V). Il est également possible d’utiliser la régie depuis l’intérieur du véhicule, et ainsi piloter plusieurs stations de détection alors même que le véhicule est en mouvement.
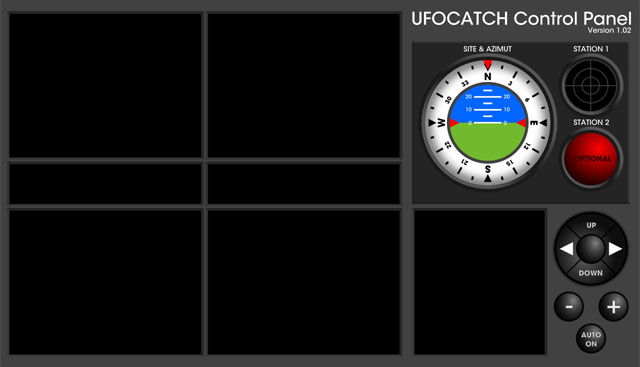
Chaque ordinateur est équipé d’un software spécifique, associé à une interface graphique, pour une meilleure visibilité de l’évolution des paramètres.
-

Les interfaces de contrôle sur leur support -

Les interfaces de contrôle en phase de programmation


Hormis l’affichage de données sous format texte, l’interface permet de consulter simultanément l’image de plusieurs caméras, dont certaines équipées d’un réseau de diffraction. La récupération des informations en sortie de deux fisheyes permet une triangulation du phénomène lumineux observé, et la visualisation de sa position, en Site et en Azimut, sur un compas. L’utilisateur a la possibilité d’afficher le profil spectral, et d’observer son évolution en direct.
l’UFOCATCH® V2 est modulable. Le prototype réalisé il y a trois ans, présenté au grand public à Strasbourg en 2010, ne permettait pas par défaut l’utilisation de plusieurs modèles de caméras. La nouvelle génération offre dorénavant cette possibilité, et permet d’équiper la lyre de différents modèles de caméras spectroscopiques ou grand public, voir même de télescopes.

A la différence du test de 2009, au cours duquel la source lumineuse avait été fixée sur des ballons gonflés à l’hélium, nous avions envisagé l’utilisation d’un Quadricoptère capable de transporter une lampe de poche fluocompacte OSRAM Dulux Pocket.
-

La source lumineuse -

Le Quadricoptere

Néanmoins, la présence de fortes rafales de vent n’a pas permit son utilisation. Le risque de perte de contrôle du modèle radiocommandé était trop grand. Il fut donc envisagé d’utiliser un cerf volant, bien plus apte à résister aux contraintes météorologique du jour.
Suite à cette journée, nous avons pu valider le bon fonctionnement de nouveaux systèmes, et envisager l’amélioration de certains concepts.
La mise en place de toute l’installation, de l’ordre de 15 à 30 minutes, est aisée. La sensibilité du fisheye permet la détection du moindre mouvement aérien. La vitesse de suivi de l’UFOCATCH® V2 est particulièrement efficace, et la station réagit parfaitement aux ordres transmis par l’interface de pilotage manuel. A l’avenir, la régie sera équipée d’ordinateurs plus puissants capables de prendre en compte encore plus de données, et qui donneront la possibilité d’activer une fonction préprogrammée permettant l’échange d’ informations avec d’autres régies mobiles, et ainsi effectuer le suivi d’un phénomène lumineux sur de grandes distances.
L’aspect le plus intéressant réside dans l’autonomie de l’ensemble des systèmes en fonctionnement simultané. Plusieurs heures de tests ont pu être effectués en utilisant uniquement une seule source d’alimentation, sans l’épuiser. Cela ouvre de nouvelles opportunités en terme d’installation de nouveaux équipements de mesures et de contrôle, ou d’utilisation de robots plus puissants.

A cette occasion, deux étudiants à l’AFPA (Association pour la formation professionnelle des adultes), sont venu réaliser un documentaire dans le cadre de leur formation. Une vidéo devrait être disponible d’ici quelques semaines.