We receive a lot of demand for the Advancement of Ufocatch. As we start year is the opportunity to make a point of it (see page ovnitech for more information on work in progress).
With regard to its operability, only testing outside on moving target we will confirm the choice of hardware and software technologies selected. We can not say that the system is now fully operational to be placed on real situation.
The cost is still no news as for now there is a prototype, but say that we are now closer to the Euro from 1500 to 2000.
If we respect the plan, the month of April could be the answer.
August 2009
- Part processing and driving of the turret are finalized.
- The part detection and calculation of the coordinates is functional.
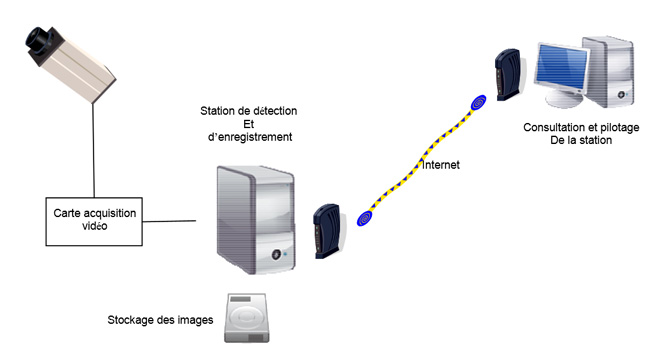
- The exchange of coordinates between two stations has been validated in WiFi, and wired (Protocol Client / Server TCPIP).

September 2009
- An interface was developed to transfer the coordinates of moving to the turret. It is composed of some hardware which converts signals, and some software will drive it.
- The hardware tourret is mechanically functional.



October 2009
- The tests were done at slow speed (laser pointer on map), and higher speed: car traveling at 50km / h at 10 meters of distance (images extracted from videos).
- Follow-up tests at low speed of movement were made indoors, and have proved positive.


Since November 2009
- Testing, the automatic detection of a light spectrum on an image, and reconition of the corresponding wavelengths.


Early 2010
- Automatic Zoom feature (autofocus).
- Test outdoors with a moving target (helium balloon equipped with a light source) in nocturnal and diurnal (Ulm).
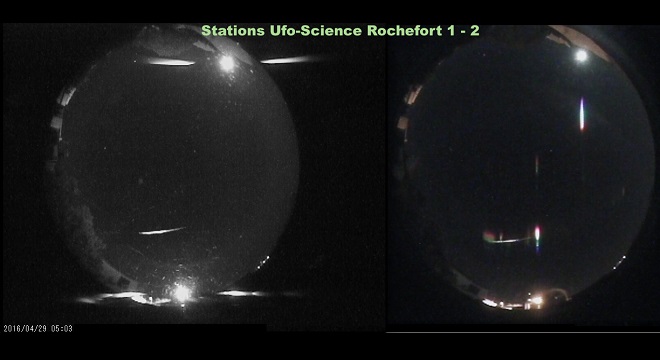
- Triangulation from a second fixed station located a few miles and transmission networks coordinate.